Research Statement
I develop trustworthy and reliable AI algorithms for robotics applications, focusing on the intersection of computer vision, machine learning, and autonomous systems. My work aims to create failure-resistant robotic systems that can operate safely in real-world environments.
Research Themes

3D Scene Understanding
Developing robust object tracking and scene reasoning algorithms for long-term autonomy. I work on contextual object association and tracking in household environments, addressing challenges in real-time classification, segmentation, and localization. Collaboration with Amazon Lab126.
Risk-Aware Navigation
Creating safe and reliable navigation systems that leverage rich visual information for autonomous planning. I focus on handling environmental symmetries, motion blur, and high-frequency demands through observability analysis and constraint-based control methods for ground and aerial robots.
Safe Uncertainty-Aware Robot Learning
Bridging the gap between reinforcement learning and control theory to develop generalizable decision-making systems. I design reward functions that guarantee safe agent actions while exploring sim-to-real transfer capabilities for robust real-world deployment.
Publications
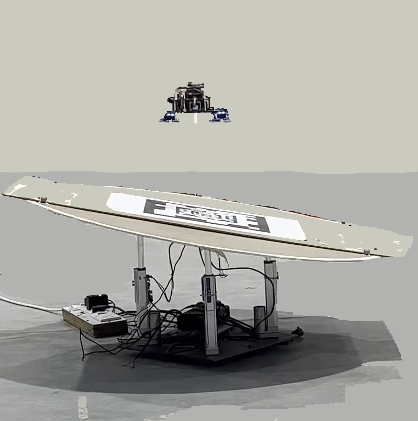
Vision-Based Autonomous Ship Deck landing of an Unmanned Aerial Vehicle using Fractal ArUco markers
Chiranjeev Prachand, Rahul Rustagi, Ritwik Shankar, Jitendra Singh, Abhishek and K.S. Venkatesh
AIAA SciTech Forum 2025
Autonomous landing of quadrotor on a moving ship-like platform solely using Vision and Deep Learning methods
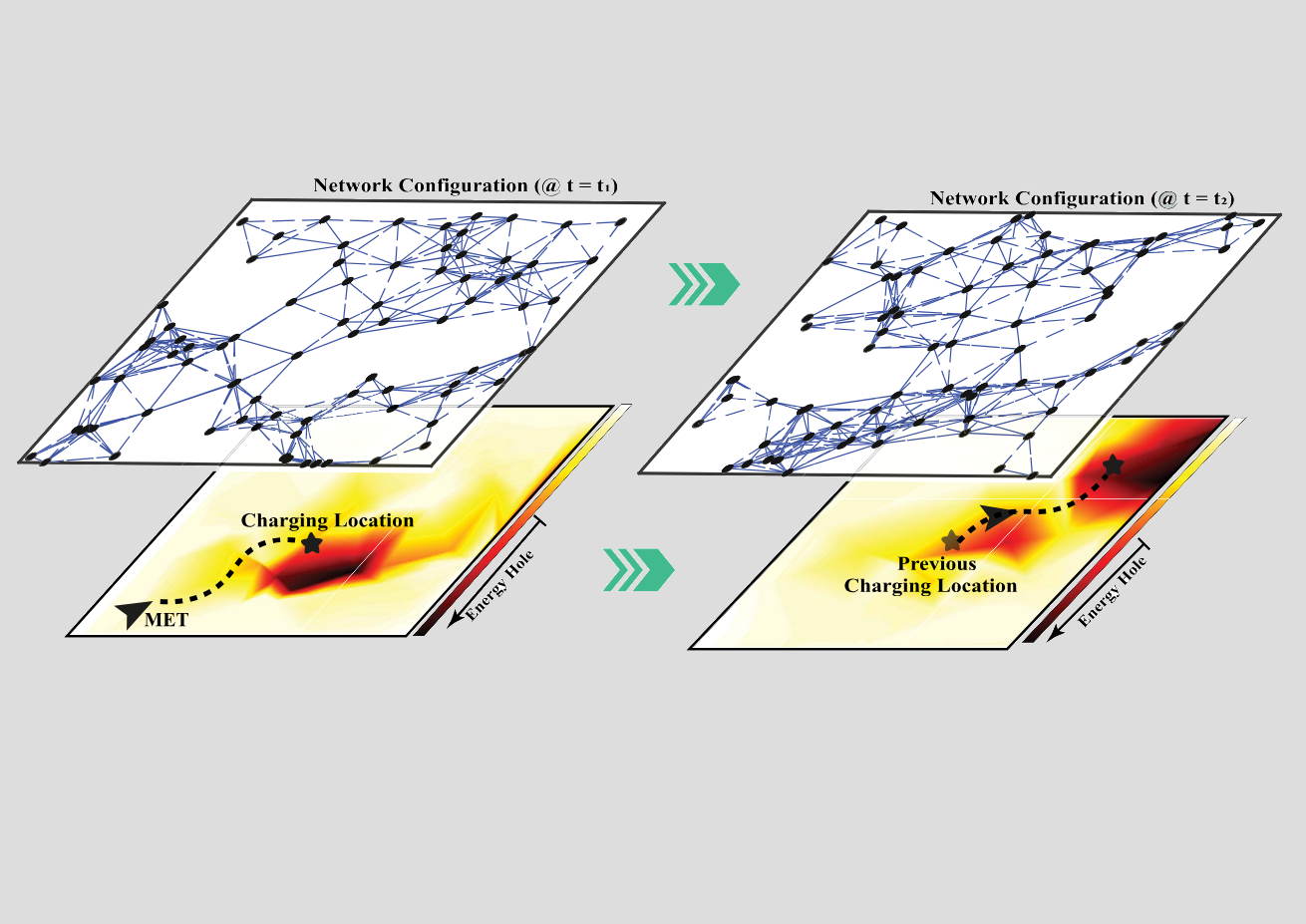
Lifetime Improvement in Rechargeable Mobile IoT Networks Using Deep Reinforcement Learning
Aditya Singh, Rahul Rustagi, Rajesh M. Hegde
IEEE Transactions on Circuits and Systems II: Express Briefs
Generalising previous MET work to work on Mobile-IoT Networks for scalability
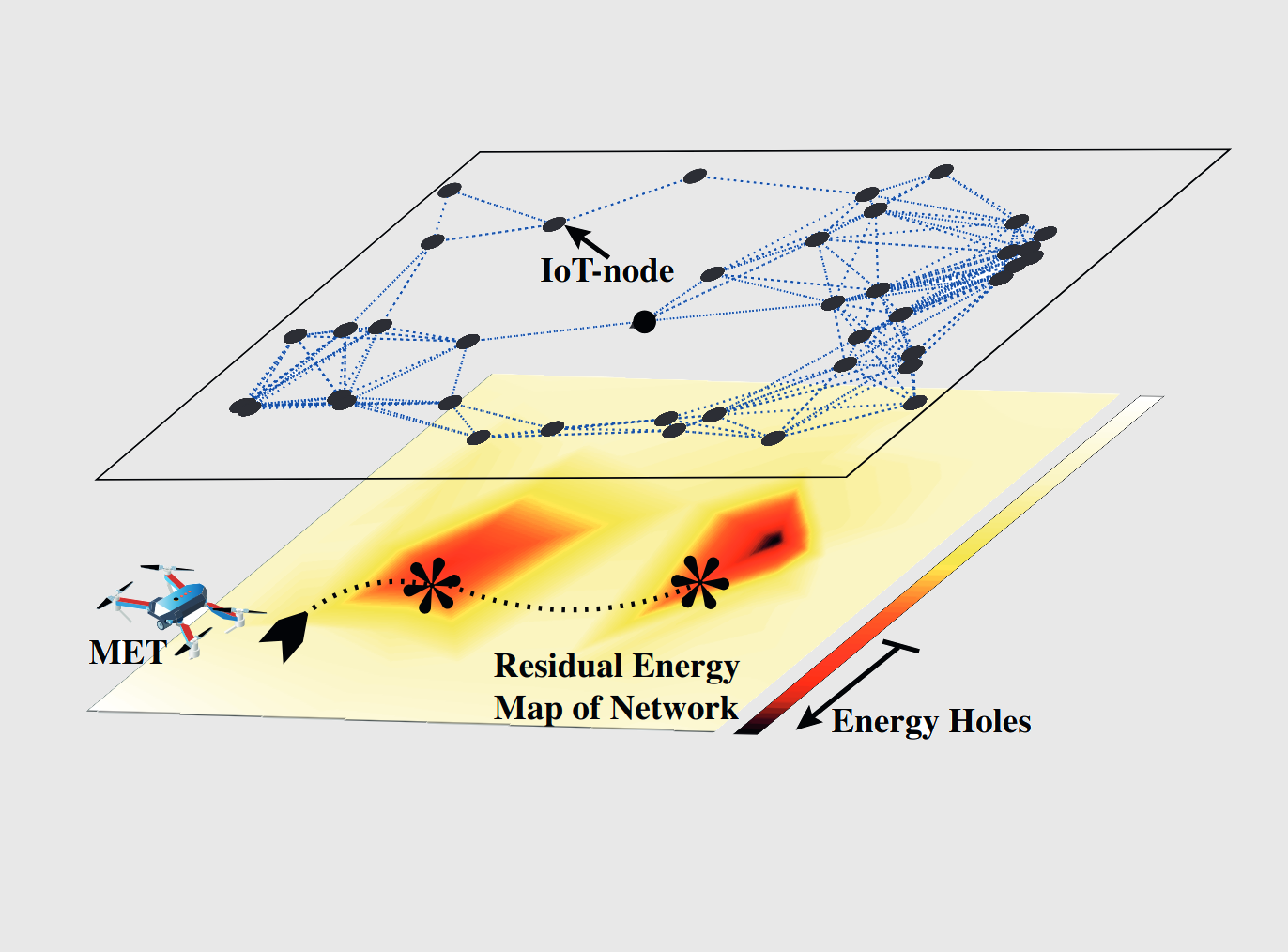
Mobile Energy Transmitter Scheduling in Energy Harvesting IoT Networks using Deep Reinforcement Learning
Aditya Singh, Rahul Rustagi, Surender Redhu, Rajesh M. Hegde
IEEE WF-IoT 2022
Maximizing longevity of static-IoT networks using Deep RL algorithms
Undergraduate Thesis
Autonomous Landing of an Unmanned Aerial Vehicle on an Oscillating Platform
Under guidance of Prof. Abhishek
IIT Kanpur (2023-2024)
Published in AIAA SciTech 2025